Advanced: Closed-Loop Control of Microbiome Dynamics
This tutorial builds on the Get Started example and demonstrates how to steer bacterial concentrations using a closed-loop neural ODE controller. For further details on neural ODE–based control, see the references below.
Loading Data
As in the Get Started example, we load experimental time-series data from the BT_WC_export.csv file:
from mgrowthctrl.utils.data import Dataloader
data = Dataloader()
data.load_local_data(
"examples/datasets/BT_WC_export.csv",
x_selector=r"BT counts",
)
For further details on the data loader, see the Data Loading section.
Initializing and Fitting a CRM
We first create and fit a CRM to reproduce the output from the Get Started example:
from mgrowthctrl.models.crm.model import CRModel, CRModelParams
# Initialize parameters
params = CRModelParams.from_shapes(n=len(data.X_names), m=len(data.S_names))
# Initialize model with parameters from the data
model = CRModel.from_single_species_data(
df=data.df,
time_col=data.time_col,
x_col=data.X_names[0], # Note: expects a single species string here
s_cols=data.S_names,
)
model.fit(
df=data.df,
time_col=data.time_col,
x_cols=data.X_names,
s_cols=data.S_names,
)
Setup and Train Closed-Loop Controller
Since we have fitted the model using the NumPy backend, we need to switch to the PyTorch backend to use automatic differentiation for controller training. This is done by extracting the fitted parameters and reinitializing the model with the PyTorch backend.
params = model.get_params()
model_torch = CRModel(names=data.names, params=params, backend="torch")
We now define a custom loss function that penalizes deviations from a target biomass of \(10^6\), as well as excessive control effort.
import torch
import numpy as np
torch.manual_seed(42)
np.random.seed(42)
def regulation_loss(trajectory, controller, model):
target = torch.tensor(1e6, dtype=torch.float32)
biomass = trajectory[:, 0]
tracking_error = (
torch.log(biomass + 1e-6) - torch.log(target + 1e-6)
).pow(2).mean()
U_tensor = controller.net(torch.log(trajectory + 1e-6))
effort = 1e-3 * U_tensor.pow(2).mean()
return tracking_error + effort, U_tensor
Next, we initialize a closed-loop neural ODE controller.
from torch import nn
from mgrowthctrl.controllers import ClosedLoopNeuralController
controller = ClosedLoopNeuralController(
state_dim=model_torch.n + model_torch.m,
n_species=model_torch.n,
n_resources=model_torch.m,
s_idx=[2, 4],
criterion=regulation_loss,
hidden_dims=[5, 5, 5],
activation=nn.ELU(),
)
We optionally define a logging function to monitor training progress.
def log_fn(model, epoch, loss, U_trajectory, sol_tensor):
if epoch % 10 == 0:
final_biomass = sol_tensor[-1, 0].item()
mean_input = float(U_trajectory.abs().max().item())
print(
f"Epoch {epoch:03d} | Loss: {loss.item():.4f} "
f"| Final biomass: {final_biomass:.1e} "
f"| Mean |u|: {mean_input:.1e}"
)
Finally, we prepare the initial conditions and train the controller.
y0_numpy = data.df[[data.X_names[0]] + data.Y_names].iloc[0].to_numpy(dtype=float)
y0_torch = torch.tensor(y0_numpy, dtype=torch.float32)
t_eval = np.linspace(0, 100, 100)
t_span = (0, 100)
controller.fit(model_torch, y0_torch, t_eval, t_span, epochs=401, lr=5e-3, log_fn=log_fn)
Visualization of Controlled Dynamics
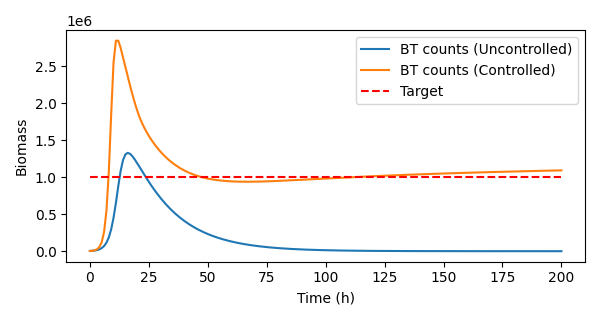
We compare the uncontrolled system dynamics with the controlled trajectory obtained from the trained controller on a time horizon that is longer than the one used during training.
t_eval = np.linspace(0, 200, 200)
t_span = (0, 200)
uncontrolled_sol = model_torch.solve(
y0_torch, t_span, t_eval, return_raw_tensors=False
)
controlled_sol = controller.simulate(
model_torch, y0_torch, t_eval, t_span
)
Finally, we visualize the effect of control on the biomass trajectory.
import matplotlib.pyplot as plt
fig, ax = plt.subplots(figsize=(6, 3.2))
ax.plot(
uncontrolled_sol.t,
uncontrolled_sol.y[0],
label=f"{model.names.X[0]} (Uncontrolled)",
)
ax.plot(
controlled_sol.t,
controlled_sol.y[0],
label=f"{model.names.X[0]} (Controlled)",
)
ax.hlines(
1e6,
0,
200,
ls="--",
color="red",
label="Target",
)
ax.set_xlabel("Time (h)")
ax.set_ylabel("Biomass")
ax.legend()
plt.tight_layout()
plt.savefig("closed_loop_result.png")
plt.show()
We observe that the controlled dynamics reaches the desired concentration:
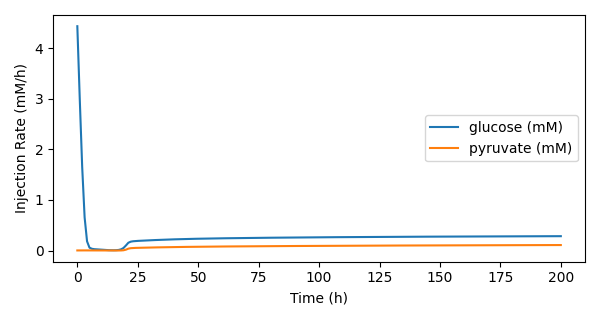
We can also inspect the learned control inputs (injection rates) over time to understand how the controller steers the system toward the target state.
raw_u = controller.get_input_history(torch.tensor(controlled_sol.y.T), model).detach()
fig, ax = plt.subplots(figsize=(6, 3.2))
for k, s_idx in enumerate(controller.s_idx):
ax.plot(
t_eval,
raw_u[:, k],
label=f"{model.names.S[s_idx]}",
)
ax.set_xlabel("Time (h)")
ax.set_ylabel("Injection Rate (mM/h)")
ax.legend(loc=5)
plt.tight_layout()
plt.savefig("closed_loop_control_inputs.png")
plt.show()
Here’s what the result looks like:
References
Asikis, T., Böttcher, L., & Antulov-Fantulin, N. (2022). Neural ordinary differential equation control of dynamics on graphs. Physical Review Research, 4(1), 013221.
Böttcher, L., Antulov-Fantulin, N., & Asikis, T. (2022). AI Pontryagin or how artificial neural networks learn to control dynamical systems. Nature Communications, 13(1), 333.
Böttcher, L., & Asikis, T. (2022). Near-optimal control of dynamical systems with neural ordinary differential equations. Machine Learning: Science and Technology, 3(4), 045004.
Böttcher, L. (2026). Control of dynamical systems with neural networks. Nonlinear Dynamics, 114(2), 79.